Printable Origami Bistable Structures for Foldable Jumpers
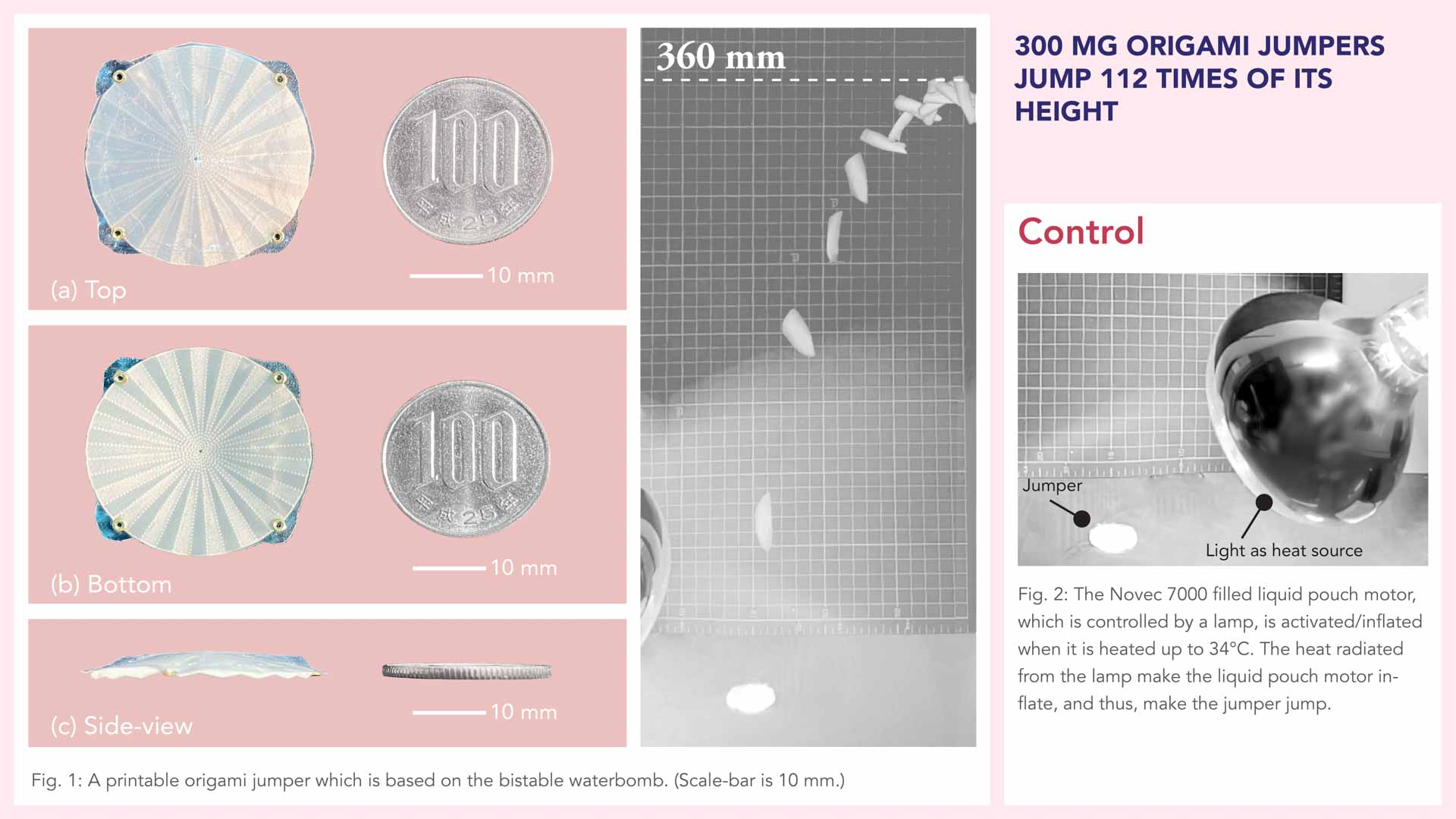
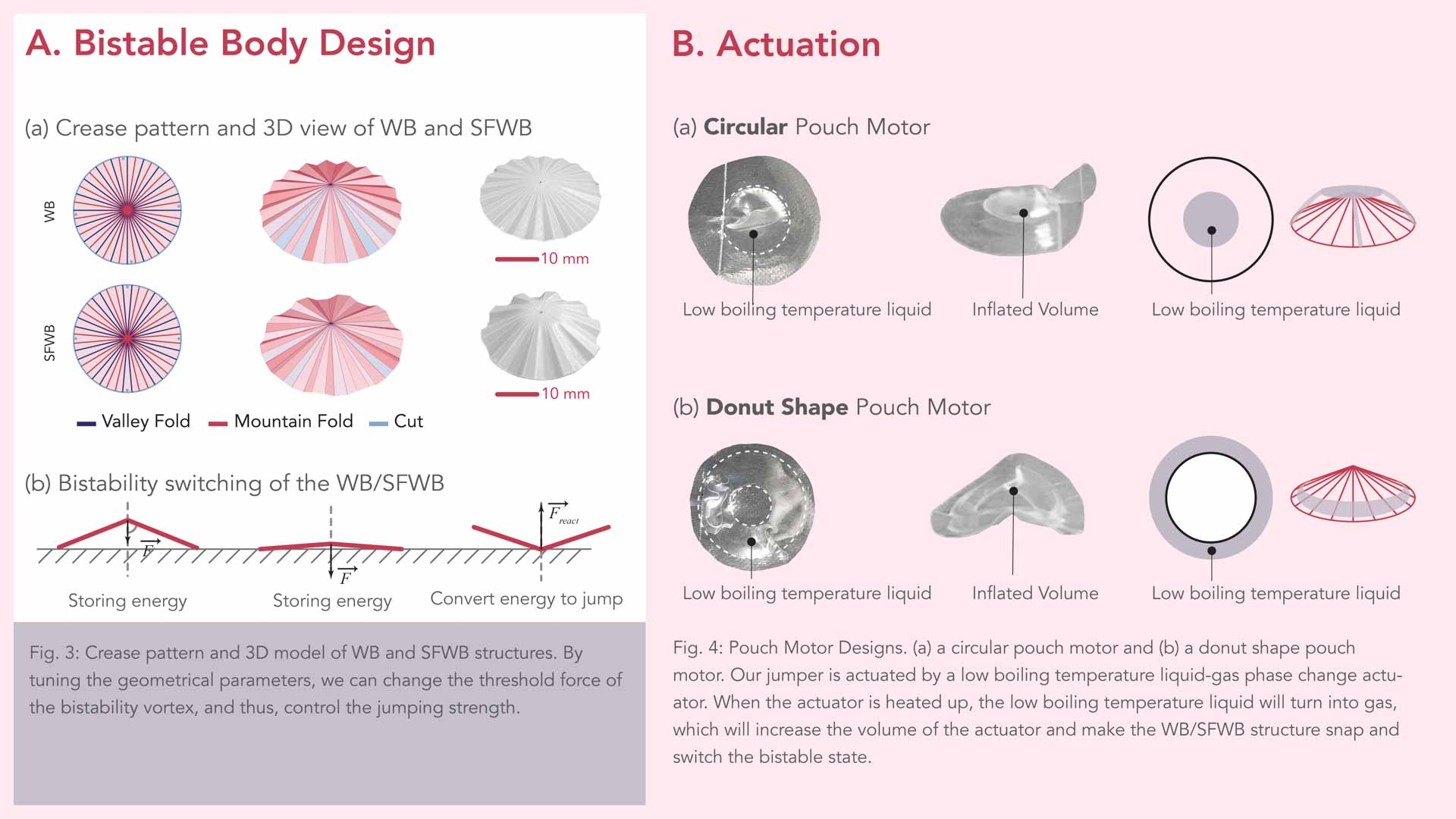
Origami/kirigami robotics are opening a path that leads to lightweight, compact, and expandable robots. However, it is generally challenging to design agile motions for origami/kirigami robots due to their size and the intrinsic limitation of the materials. In this paper, we propose to use the bistability of the waterbomb base structure to generate the swift motion of the robots. We evaluate the bistability of the waterbomb-based structure and build origami jumpers with different configurations of the body to help analyze the behavior of the waterbomb base bistable structure. The jumper is actuated by a phase change liquid pouch actuator. Our jumper is lightweight (0.3 g), flattenable, and able to jump to more than 12 times of its diameter and 112 times of its height.
Publication
Tung D. Ta*, Zekun Chang*, Koya Narumi, Takuya Umedachi, and Yoshihiro Kawahara. 2022. Printable Origami Bistable Structures for Foldable Jumpers. In 2022 International Conference on Robotics and Automation (ICRA). IEEE Press, 7131–7137. [DOI]

{kind=link}
{kind=link}